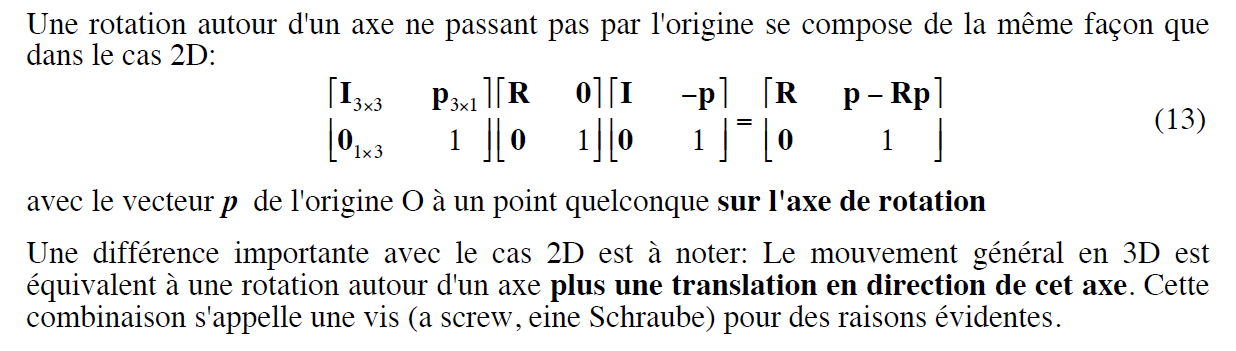
There is a sentence in the chapter 2.1 Kinematics page 9, reference book."Le mouvement général en 3D est équivalent à une rotation autour d'un axe plus une translation en direction de cet axe." The google translation is "The general movement in 3d is equivalent to a rotation about an axis plus a translation in the direction of this axis". I didn't understand it. And I think it should be corrected to "The general movement in 3d is equivalanet to a rotation around an axis not passing through the origin." It should be similar to what we said in 2d: "Any combination of translation and rotation in 2d can be expressed in pure rotation around a center of rotation P"
A general motion in 2-d space can be replaced by a rotation around a point on the plane (at infinity in case of pure translation).
This is because we can always find this center as was done in ex. 2.4 and you seem to have well understood the 2-d case.
In 3-d, any translation component perpendicular to the rotation axis can be compensated in exactly the same way, i.e. by moving the rotation axis in space, but of course, by keeping the direction of the rotation axis fixed.
What cannot be compensated in this way is any translation component in the direction of the rotation axis. (A vector cross-product with the rotation axis is involved in this operation and this changes by definition only the components perpendicular to the rotation axis).
So the translation component in direction of the axis stays invariant. The general motion in 3-d is therefore a screw motion. If we have a pure translation (in any direction), the rotation axis just has to be moved to infinity, exactly as the center of rotation in the 2-d case. If the translation component in direction of the axis is zero, we have a degenerated screw (pitch = 0) and a plane motion (2-d kinematics), this is a special case of a general 3-d motion.
This statement about the screw motion is called « Chasle’s theorem » (of kinematics), there is a wikipedia article on this topic:
https://en.wikipedia.org/wiki/Chasles'_theorem_(kinematics)
It is named after the french mathematician Michel Chasle (1793-1880).
The statement as you propose to formulate it, is therefore not correct. We consider here only a position before and after a change, we do not yet consider how we get there. For such changes of position and orientation, there is always one well definde axis (except for pure translation). There is no such thing as « rotation around a point », as long as you consider just postions before and after a motion. Rotation « around a point » will only come into play, when we consider the entire continuous path of a motion change, which we have not done in this introductory chapter on kinematics.