UAV For Precise Mapping
This course focuses on the theoretical and practical
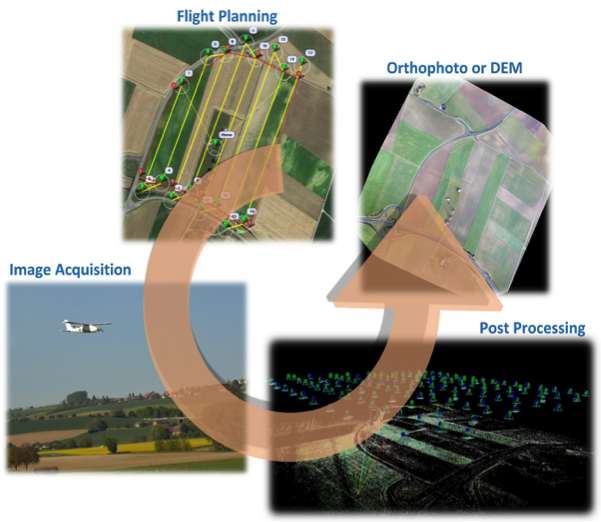
aspects of precise mapping with Micro Aerial Vehicles (MAV). In the first part
of the course the students will learn the concepts of dynamical modelling,
control, navigation and guidance of a small aircraft. They will acquire also
the theoretical and practical skills of mission planning and execution. The
accent of the second part of the course is in the mapping from (close) aerial
photography with and/or without the support of navigation data. The theoretical
concepts of sensor orientations are explained with particularities of
consumer-market optical sensors and exercised practically on the imagery taken
by MAV during the first week. The students will then acquire the concepts of
post-processing navigation data for the trajectory recovery at camera events
and their insertion into integrated sensor orientation, benefit of which are
also exercised practically for the resulting mapping product. The final
objective is to gain sound understanding of mitigation of errors due to
imperfect spatial-temporal stability of UAV navigation/optical payload through
advanced modelling.
- Professor: Jan Skaloud