Hello,
I am wondering why there are X_i and Y_i because I heard the professor said the lower-left corner is the origin. And what's p_u and p_v here?
Many thanks,
Yuehang SUN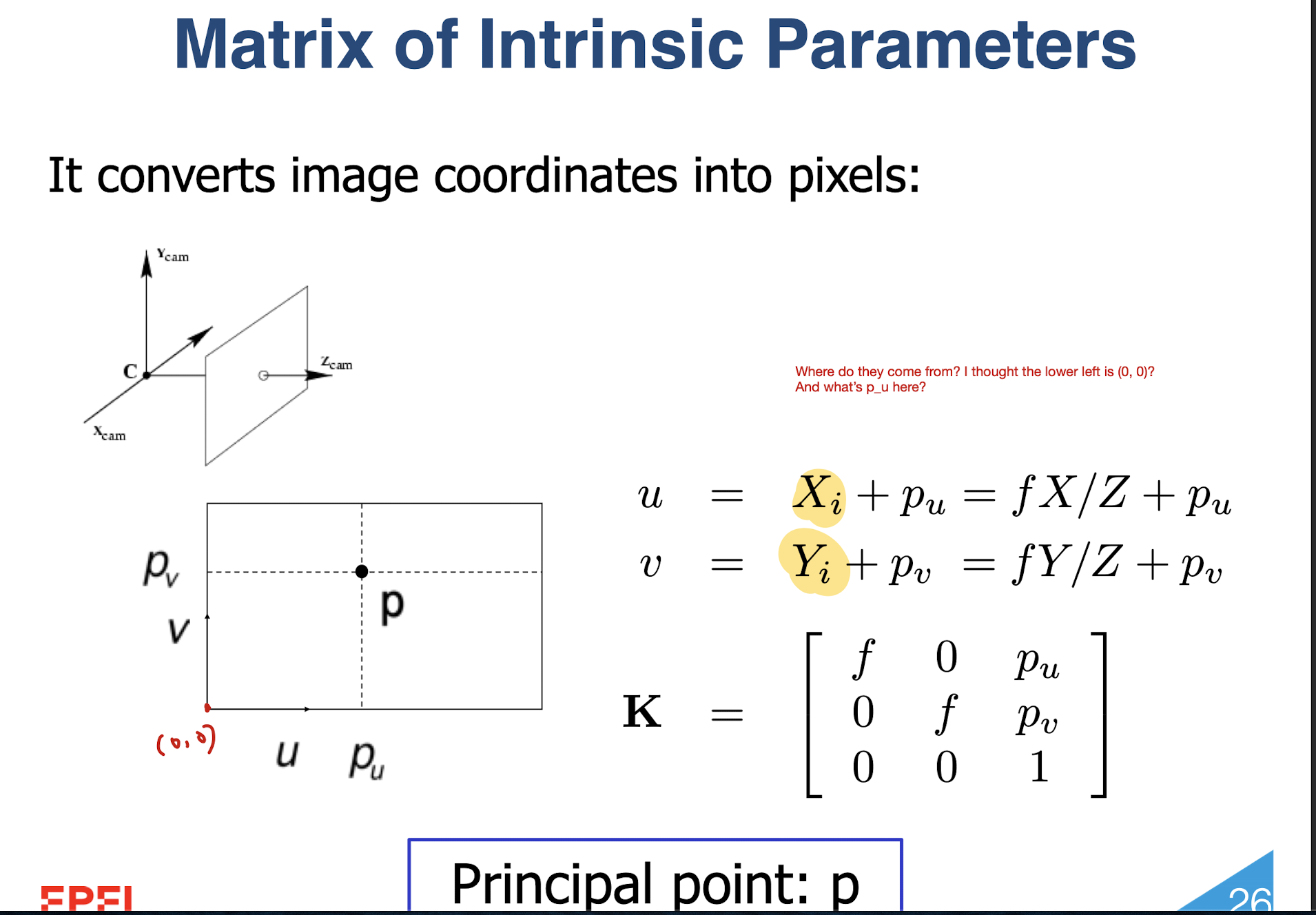
Hello,
Correct me if I am mistaken, but from what i understood, Xi and Yi are the coordinates in the image system of the point we want to convert to a pixel coordinate. Pu and pv are the projection of the optical center of your camera on the image plane we use to do a translation, and yes the corner is (0,0) but the current point we look at is (Xi,Yi).
Best,
Gaultier
Hi Gaultier,
Thanks a lot for your clarification! I realized that I mistook (u, v) as the coordinate of the point we want to convert. Now everything makes sense.
Have a nice weekend,
Yuehang
I have a question on the next slide (related):
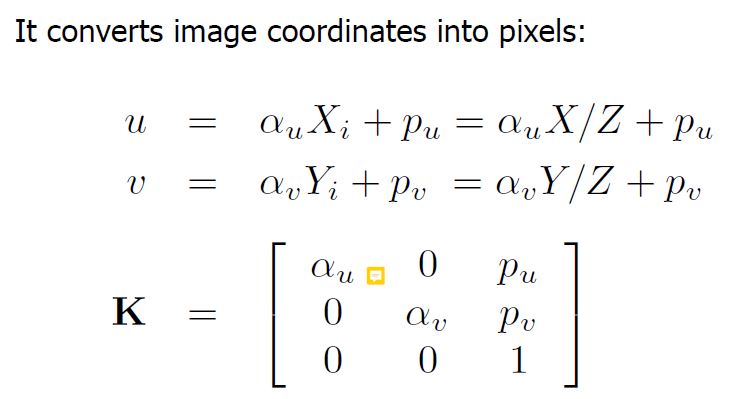
Here, on the equality, it seems that X_i = X/Z, whereas on the slide before (screenshot of Yuehang Sun) X_i = f * X/Z.
Therefore, shouldn't it be alpha_u * f in the matrix K?
Follow the pulses of EPFL on social networks
© 2023 EPFL, all rights reserved