Topics in Autonomous Robotics
Topic outline
-
Topics in Autonomous Robotics
Students will be introduced to modern approaches in control and design of autonomous robots through lectures and a project. The course takes place on particular dates of the spring semester, typically half a day of lectures. The dates are provided below.
There will be a choice of research projects for each topic. A project consists in a critical review or experimental research. Ideally, a research project could become a conference paper. Students should choose one project and register on this website. Projects should be done with a lecturer from another lab than the host lab of the student. Students will be assessed on the research projects: written report (80%) + oral presentation (20%). The grading of the research project is done by the corresponding professor.
The written report should be 6-8 pages long, and formatted using the IEEE style files provided below and according to the guidelines of each project. All reports should be written in English. The oral presentation of the report will last 20 minutes, including 5 minutes of questions and answers.
Lecturers and Course dates. Please check dates and hours carefully as they change from lecture to lecture (updated on 17.03.2019):
- Mohamed Bouri, Monday March 18, 8:15-13:00
- Auke Ijspeert, Monday April 1, 9:15-12:00 and 14:15-15:00
- Silvestro Micera, Thursday April 4, 9:15-13:00
- Francesco Mondada, Monday April 8, 8:15-12:15
- Selman Sekar, Thursday April 11, 9:15-13:00
Rooms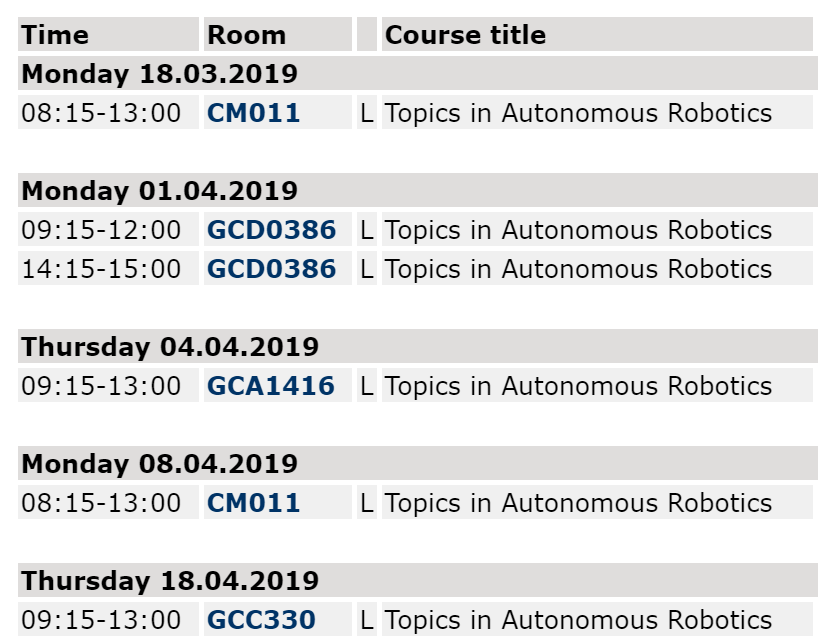
Credits: 4 (24 hours lecture + 56 hours project)
Deadline for project registration: April 19, 2019
Deadline for handing in project reports: July 26 2019
Exam Date: To be defined
Presentations should last for 10-15 minutes followed by 10 minutes question.
-
Monday March 18th 2019, 8:15-12:45 : Robotics for Rehabilitation and Assistance (Mohamed Bouri)
Rehabilitation Robotics (Part I)
- Actuation and sensing
- Concepts and metrics
- Lower limb and Upper limb devices
- Control strategies and therapies
Walk Assistive Robotics (Part II)
- Exoskeletons, definitions and review of existing devices
- Control strategies
- Perspectives for daily living
-
Monday April 1 2019, 9:15-12:00 and 14:15-15:00: Locomotion control (Auke Jan Ijspeert)
- Principles of locomotion, different types of wheeled robot structures. Control of a differential drive robot.
- Review of different approaches to the control of locomotion of legged robots with multiple degrees of freedom (e.g. quadruped robots, and humanoid robots):
- ZMP-based control
- heuristic control
- CPG-based control
- discussion of how robots can be used to test biological models, and how biology can in return suggest new control approaches
- Presentation of some research projects in the Biorob lab.
- Principles of locomotion, different types of wheeled robot structures. Control of a differential drive robot.
-
Thursday April 04 2019: Design and Control of Prosthetic Devices (Silvestro Micera)
-
Monday April 8 2019: Mobile Robot Design (Francesco Mondada)
Structure:- Existing Mobile robot products
- Robot design methodologies
- Case studies:
- Khepera: Mechatronics >< Market
- e-puck & Thymio II: Mechatronics >< Education
- Leurre & ASSISIbf: Mechatronics >< Biology, methodology
- S-bot & marXbot: Mechatronics >< Computer Science, approach
- Robotic glasses & Ranger: Mechatronics >< user interaction
- Conclusion / assignements
-